در مطالب قبلی درباره ایده پیشنهادی پایان نامه ها و مقالات صحبت به میان آمد ، اما اینکه دقیقاً چه طور می توان یک ایده را در عمل پیاده سازی نمود مقداری گنگ و نامفهوم به نظر می آمد. در این مقاله از کلی گویی اجتناب می کنیم و سعی خواهیم داشت یک ایده واقعی را که مربوط به ساخت مقاومت متغیر داخل مدار مجتمع است به صورت تخصصی مورد تجزیه و تحلیل قرار دهیم.
البته مطالب کاملاً تخصصی و مربوط به رشته برق ، گرایش مدارهای مجتمع الکترونیک می باشد و اتتظار نمی رود برای کسی که رشته دیگری مثلاً مکانیک یا شیمی خوانده جذابیتی داشته باشد. من بعد سعی خواهیم کرد در مقالات آتی مثالهای تخصصی دیگری از رشته ها و گرایش های مختلف داشته باشیم.
ساخت مقاومت متغیر در مدارهای مجتمع الکترونیک (IC)
یک مدار مجتمع (IC) وقتی که ساخته می شود کاملاً استاتیک بوده و امکان تغییر دادن آن وجود ندارد و تعدادی پین جهت تغذیه ، پورت های ورودی و خروجی و … خواهد داشت. در این مقاله به بررسی یک ایده پیشنهادی برای ساخت مقاومت متغیر داخل مدار مجتمع الکترونیک خواهیم پرداخت.
ساخت مقاومت در مدارهای مجتمع cmos با استفاده از پلی سیلیکون که یک نوع نیمه هادی است انجام خواهد شد. مقدار مقاومت یک نیمه هادی یا فلز از فرمول R= ∂*L/A محاسبه خواهد شد که ∂ مقدار مقاومت مخصوص یک ماده است که بستگی به تکنولوژی ساخت و جنس مواد به کار رفته دارد و مقدار آن به طور معمول ثابت است ، L طول نیمه هادی و A سطح مقطع آن می باشد.
پس با دانستن مقدار مقاومت ویژه می توان طوری طول و عرض یک نیمه هادی را تنظیم نمود که به مقدار مقاومت دلخواه برسیم. اما مشکل اینجاست که مقدار مقاومت ویژه پلی سیلیکون بسیار کم است و اگر بخواهیم یک مقاومت در حد چند صد کیلو اهم داشته باشیم نیاز به فضای زیادی در داخل مدار مجتمع داریم پس عملاً ساخت مقاومتهای بزرگ در مدارات مجتمع امکان پذیر نمی باشد.
اگر بخواهیم مثال عملی برای کاربرد مقاومت متغیر در مدارهای مجتمع داشته باشیم می توان به تقویت کننده با گین متغیر ، اسیلاتور کنترل شونده با ولتاژ ، مدار تولید پالس با عرض متغیر (PWM) ، مدارات تولید تابع عضویت فازی (MFC) و کاربردهای زیاد دیگری اشاره نمود.
ایده اصلی برای ساخت یک مقاومت متغیر استفاده از یک دسته مقاومت است که به صورت سری با هم قرار دارند به گونه ای که با وارد شدن هر مقاومت به مدار مقدار مقاومت معادل کل افزایش یابد. همانطور که در شکل زیر دیده می شود مدار متشکل از ۸ مقاومت R1 تا R8 است که به صورت سری با هم قرار گرفته اند و ترانزیستورهای ماسفت که بین دو مقاومت مجاور هم قرار گرفته اند نقش سویچ را ایفا می کنند.
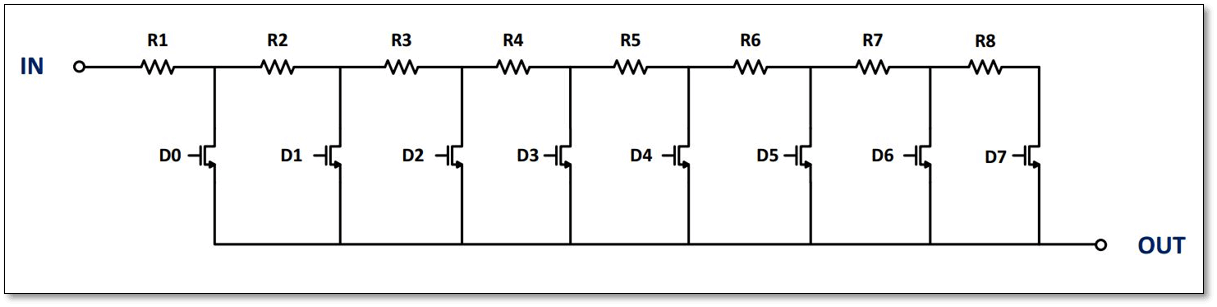
اگر مقدار هر مقاومت را ۱٫۲۵kΩ در نظر بگیریم مقدار مقاومت معادل کل یعنی R1+R2+R3+R4+R5+R6+R7+R8 حدود ۱۰kΩ به دست می آید. پس کمترین مقدار مقاومتی که می توانیم داشته باشیم ۱٫۲۵kΩ و بیشترین مقدار آن ۱۰kΩخواهد بود. و به ازای هر استپ که جلوتر برویم مقدار مقاومت معادل ۱٫۲۵kΩ افزایش خواهد داشت.
به طور مثال اگر بخواهیم یک مقاومت ۵kΩ داشته باشیم باید سویچ D3 روشن شود و بقیه سویچ ها خاموش باشند که در این صورت مقدار مقاومت معادل کل که بین دو پایانه IN و OUT قرار گرفته برابر R1+R2+R3+R4=5kΩ به دست می آید.
نکته بسیار مهمی که باید در نظر داشت این است که هیچ وقت نباید دو سویچ به طور همزمان روشن شوند و در هر لحظه از زمان تنها یک سویچ باید فعال باشد و بقیه سویچ ها حتماً خاموش باشند. پس باید مداری طراحی کنیم که بتواند به ازای ورودی های دریافتی یک خروجی ۸ بیتی را به نحوی تولید کند که یک بیت آن برابر ۱ منطقی و بقیه بیتهای آن ۰ منطقی باشد.
و بیت های خروجی را مستقیماً به گیت ترانزیستورهای ماسفت (D0 تا D7 ) وصل می کنیم. با یک شدن هر بیت خروجی ترانزیستور به صورت یک سویچ بسته عمل خواهد کرد و مقاومت مربوطه را به پایه OUT متصل خواهد نمود.
اگر بخواهیم مدارمان را با دقت بیشتری کنترل کنیم باید تعداد مقاومت ها و سویچ ها را افزایش دهیم. مثلاً می توانیم به جای ۸ مقاومت ۱٫۲۵kΩ از ۲۰ مقاومت ۵۰۰Ω استفاده کنیم ولی این کار به قیمت پیچیدگی بیشتر مدارمان و بالطبع افزایش توان مصرفی و فضای اشغالی در چیپ تمام می شود.
مداری که بتواند تابعی تولید کند که به ازای ورودی های مختلف خروجی را طوری کنترل کند که در هر لحظه از زمان یک خروجی ۱ منطقی شود و بقیه خروجی ها ۰ منطقی باشند می تواند یک دیکودر باشد. در این مثال خاص یک دیکودر ۳*۸ می تواند هدف ما را برآورده کند.
مدار دیکودر ۳ به ۸
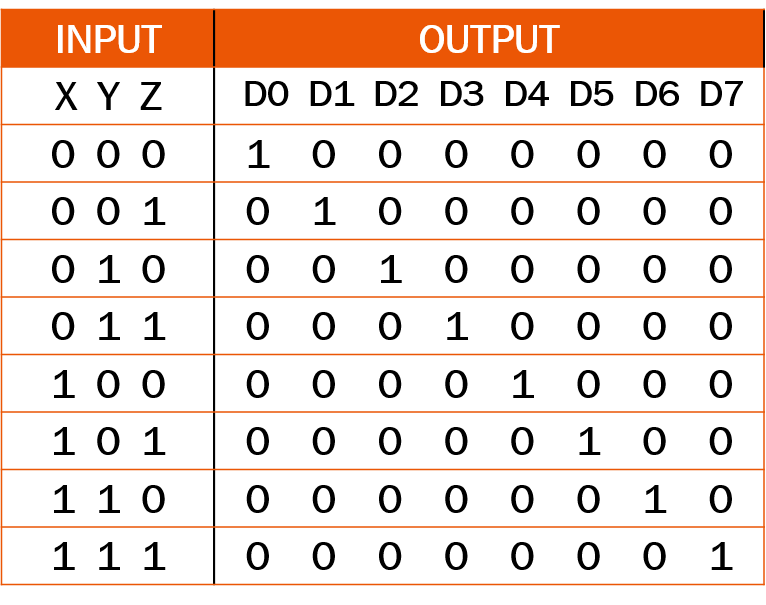
شکل زیر جدول صحت یک دیکودر ۳ به ۸ را نشان می دهد. همانطور که می بینیم به ازای هر ورودی باینری در هر لحظه از زمان تنها یکی از خروجی های D0-D7 یک خواهد بود. بنابراین با ۳ بیت خواهیم توانست ۸ حالت را کنترل کنیم. رابطه تعداد بیت های خروجی با بیت های ورودی به صورت می باشد که n تعداد ورودی ها است یعنی به ازای ۳ بیت ورودی ۸ حالت در خروجی قابل است و اگر مثلاً ۴ بیت داشته باشیم می توانیم ۱۶ حالت را کنترل کنیم.
شکل زیر نحوه پیاده سازی مدار دیکودر ۳ به ۸ را با استفاده از گیت های منطقی نشان می دهد. همانطور که مشخص است اگر سه بیت ورودی X,Y,Z و متمم های آن را داشته باشیم با استفاده از گیت های AND سه ورودی خواهیم توانست ۸ حالت مختلف در خروجی تولید کنیم. اگر بیتهای ورودی ۴ عدد بود باید برای تولید خروجی از گیت های AND 4 ورودی استفاده کنیم که این به پیچیدگی بیشتر سخت افزاری منجر می شود.

نحوه تست مدار تولید مقاومت متغیر در نرم افزار های شبیه ساز
حال که مدارمان را طراحی کردیم اکنون باید بتوانیم صحت کارکردمقاومت متغیر را با استفاده از نرم افزار های تخصصی مربوطه بسنجیم. شکل زیر نحوه تست صحیح مدار را نشان می دهد.
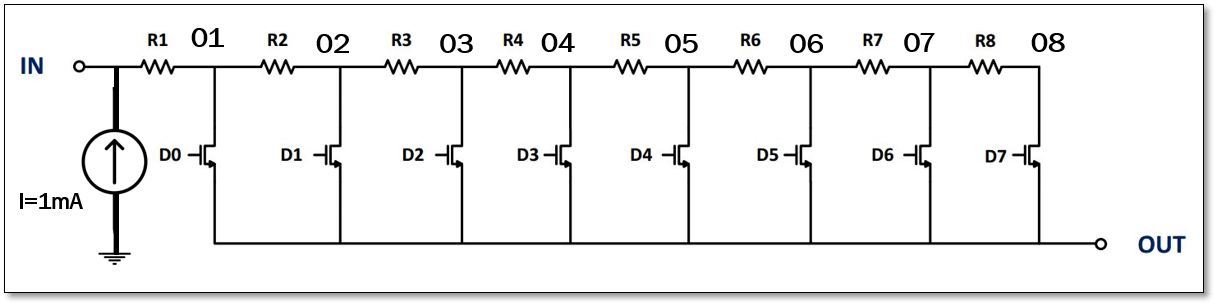
برای تست صحت عملکرد مقاومت متغیر یک منبع جریان ۱ میلی آمپری را به گره ورودی IN متصل می کنیم و اگر مثلاً بخواهیم یک مقاومت ۶٫۲۵kΩ داشته باشیم باید ورودی باینری XYZ حالت ۱۰۰ به خود بگیرد.
در این صورت بر طبق جدول خروجی D4 یک منطقی خواهد شد و ترانزیستور مربوطه را که همانند سویچ عمل می کند روشن نموده و مسیر جریان که از ورودی IN وارد می شود از طریق مقاومت های R1,R2,R3,R4,R5 بسته می شود بنابراین گره ۰۵ به گره خروجی OUT متصل خواهد شد پس اگر ولتاژ بین گره های IN وOUT را اندازه گیری کنیم باید باید مقدار۶٫۲۵ ولت را نشان دهد V=R*I=6.25k*1mA.
پس دیدیم که با این روش پیشنهادی خواهیم توانست یک مقاومت متغیر در داخل مدارهای مجتمع الکترونیک ایجاد کنیم که با بیت های دیجیتالی قابل کنترل می باشد.
گروه آموزشی استاد راهنما آماده ارائه خدمات مشاوره ای برای انجام پایان نامه ارشد برق در تمامی گرایش ها می باشد.
